This Glove Takes Inspiration From An Octopus’ Arm
4:58 minutes
Octopuses have more than 2,000 suckers on eight arms, and each one is controlled individually, making these critters incredibly dextrous. So when a team of researchers wondered how to design a glove that could hold onto slippery objects underwater, they turned to octopuses for inspiration. Ultimately, they created something they’re calling an octa-glove.
Guest host Sophie Bushwick talks with Michael Bartlett, an assistant professor of mechanical engineering at Virginia Tech, about his team’s engineering, and what they learned from the ambidextrous creatures.
Invest in quality science journalism by making a donation to Science Friday.
Michael Bartlett is an assistant professor of mechanical engineering at Virginia Tech in Blacksburg, Virginia.
SOPHIE BUSHWICK: If there’s one thing we love here at SciFri, it’s cephalopods, a group of animals that include squids and octopuses. And yes, I know Cephalopod Week happened last month, but our fascination with these critters is year round. And we’re not the only ones.
Earlier this month, a team of researchers unveiled the octa-glove, a device that can latch onto slippery objects underwater. Here to tell us more about the octopus-inspired glove is Michael Bartlett, assistant professor of mechanical engineering at Virginia Tech, based in Blacksburg, Virginia. Michael, welcome to Science Friday.
MICHAEL BARTLETT: Hi, Sophie. It’s great to be here with you. Thank you.
SOPHIE BUSHWICK: Let’s start at the beginning. Why did you look to octopuses for inspiration?
MICHAEL BARTLETT: So an octopus is an absolutely amazing creature. We know that it has eight arms, but it also has over 2,000 suckers across those arms. And it also has mechanical sensors and chemical sensors, which allow it to actually feel and taste its environment. And importantly, its brain is actually distributed throughout its body. So it can control its arms, its adhesion, and it can do all of this by getting information from the sensor and processing in its brain across its body.
SOPHIE BUSHWICK: Does all that contribute to why it’s so great at grabbing things underwater?
MICHAEL BARTLETT: Yeah, I really think it’s that combination of that suction control, the sensing, and then the processing of that information to then control the manipulation. And what that does is it actually allows the octopus to individually control those 2,000 adhesives. I have a hard enough time controlling my 10 fingers. I don’t know how the octopus can control over 2,000 suckers on eight arms.
So with our system, we have an adhesive which can mimic those suckers. We then use microLiDAR sensors, which allow us to mimic those mechanical sensors. We can take all that information and then process it in a microcontroller. So that allows us to have this synthetic nervous system, this adhesion control. So that combination is what really got us started with the octa-glove.
SOPHIE BUSHWICK: And walk me through what the final product, what this glove, looks like and how it works.
MICHAEL BARTLETT: Yeah, so what we have is we first needed to develop the suckers, or the adhesives. And this consists of a rubber stalk about the size of a raspberry that has a thin membrane on top. And if we change the shape of that membrane, we can quickly turn off and turn on adhesion. So we use what’s called a microLiDAR sensor. And what that microLiDAR sensor allowed us to do was put it next to an adhesive, and we could actually then see the environment.
When you have the octa-glove on, what you have is an adhesive with a sensor at each of your fingertips. So all you have to do is, with this glove on, is move towards an object underwater. At that point, the sensor will be looking to detect what’s near it. And as soon as you get close to an object, it automatically turns on the adhesion, or the suckers, and you are then attached to whatever was beneath your hand with adhesion.
SOPHIE BUSHWICK: So the user doesn’t even have to grip onto the object. The glove does it all. That’s incredible. What kind of stuff can it pick up?
MICHAEL BARTLETT: Yeah, that’s exactly right. All we have to do is get close, and then we can grip that object automatically. So that allows us to pick up all kinds of things. So in our testing, we picked up plastics and metals. We picked up flat objects and curved objects. And we picked up hard and soft things.
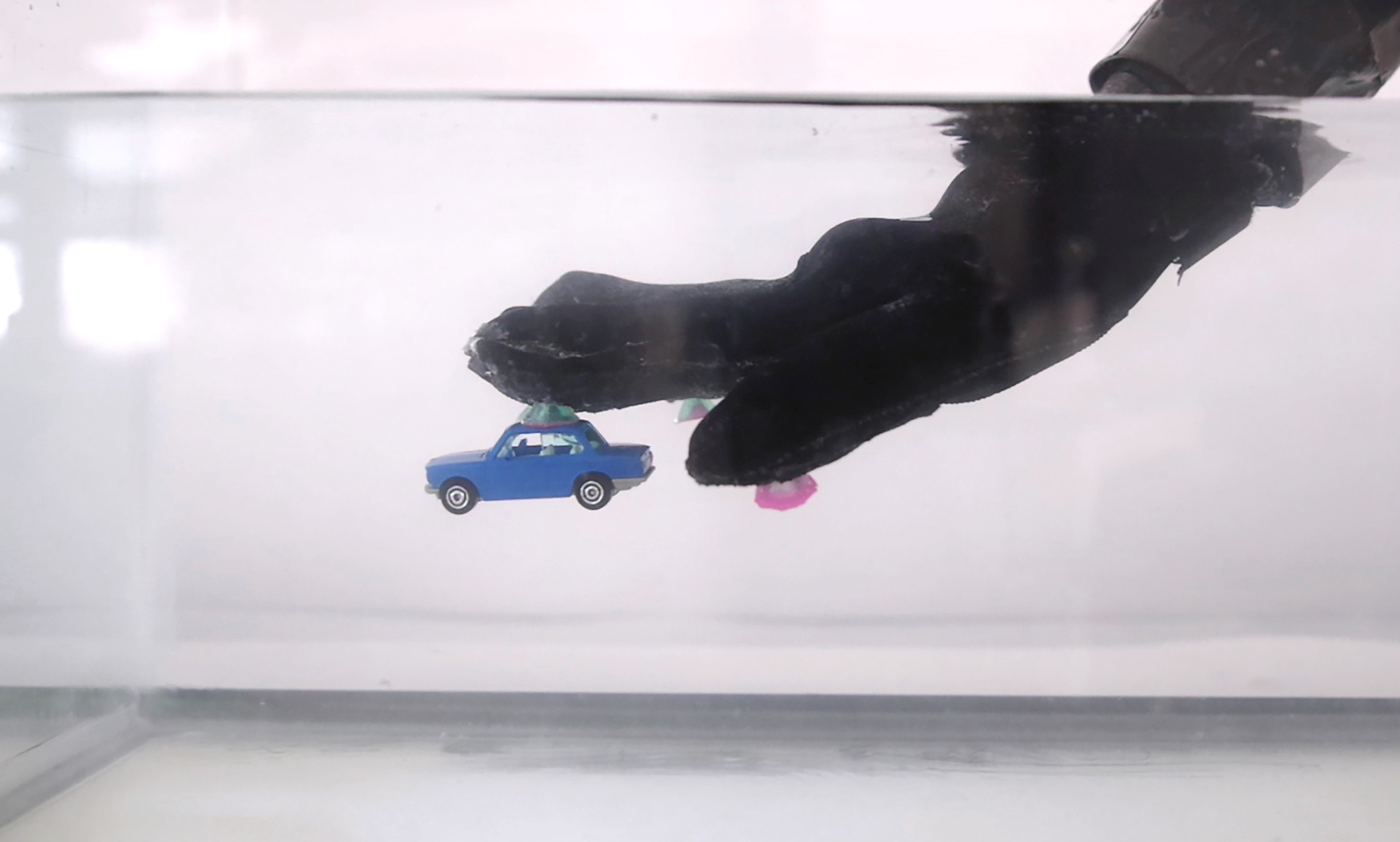
So for example, we were actually able to put a little toy car at the bottom of the fish tank. And as you approach it with the octa-glove, with just a single fingertip, you can pick up that toy car and move it around in the water. And then it will automatically release that car as soon as you’re done.
SOPHIE BUSHWICK: Oh, wow. And how do you hope people will use this technology in the future.
MICHAEL BARTLETT: So I think one of the most compelling potential use cases would be for some kind of rehabilitation or assistive devices. So if a user had this glove on, and let’s say they needed some help picking up objects, maybe taking a drink of water, if the user could just get their hand close to an object, the octa-glove would just attach to that cup, for example, and then the user could actually then not have to grip that or squeeze that, but just use the glove.
I also think it could be fun in situations underwater, things like scuba diving, maybe even different kinds of bio-sampling underwater. What’s kind of fun for us, too, is what if we could make a robot that was soft and deformable just like the octopus, and then took this adhesion and sensing approach, and then put that across that robot? Then we would have this really, I think, amazing biomimetic system that looks like an octopus, grips like an octopus, and maybe someday can swim through the ocean like an octopus.
SOPHIE BUSHWICK: A little octopus robot.
MICHAEL BARTLETT: Exactly.
SOPHIE BUSHWICK: Michael, thank you for joining us.
MICHAEL BARTLETT: Sophie, thank you so much for having me.
SOPHIE BUSHWICK: Michael Bartlett is an assistant professor of mechanical engineering at Virginia Tech, based in Blacksburg, Virginia.
Copyright © 2022 Science Friday Initiative. All rights reserved. Science Friday transcripts are produced on a tight deadline by 3Play Media. Fidelity to the original aired/published audio or video file might vary, and text might be updated or amended in the future. For the authoritative record of Science Friday’s programming, please visit the original aired/published recording. For terms of use and more information, visit our policies pages at http://www.sciencefriday.com/about/policies/
Rasha Aridi is a producer for Science Friday and the inaugural Outrider/Burroughs Wellcome Fund Fellow. She loves stories about weird critters, science adventures, and the intersection of science and history.
Sophie Bushwick is a freelance science journalist and editor based in New York.