Super Strong Robot ‘Muscles’ Inspired By Origami
9:53 minutes

Just as origami can transform a piece of paper into a three-dimensional work of art, scientists have now used the techniques to transform thin, flimsy materials like polyester into incredibly strong artificial muscles that can lift a thousand times their weight.
The research team built the muscles by inserting origami-like folding skeletons into flexible plastic, nylon or polyester skins filled with water or air. Then, by sucking the air or water out of them, the researchers were able to make the artificial muscles contract and grab things—just like real muscles due to the movements “programmed” into the devices’ folding skeletons. They describe their findings in the Proceedings of the National Academy of Sciences.
[Take a peek at the glittery jewels of the bee world.]
“One thing I’m interested in is making machines that are like ‘Transformers,'” says study author Daniela Rus of Massachusetts Institute of Technology. “Machines that can change their body to match their body to the task they need to do.” In this interview, she discusses her latest work, along with other projects like an ingestible robotic pill that unfolds in the stomach.
View photos and video of the origami-inspired robots in action below.

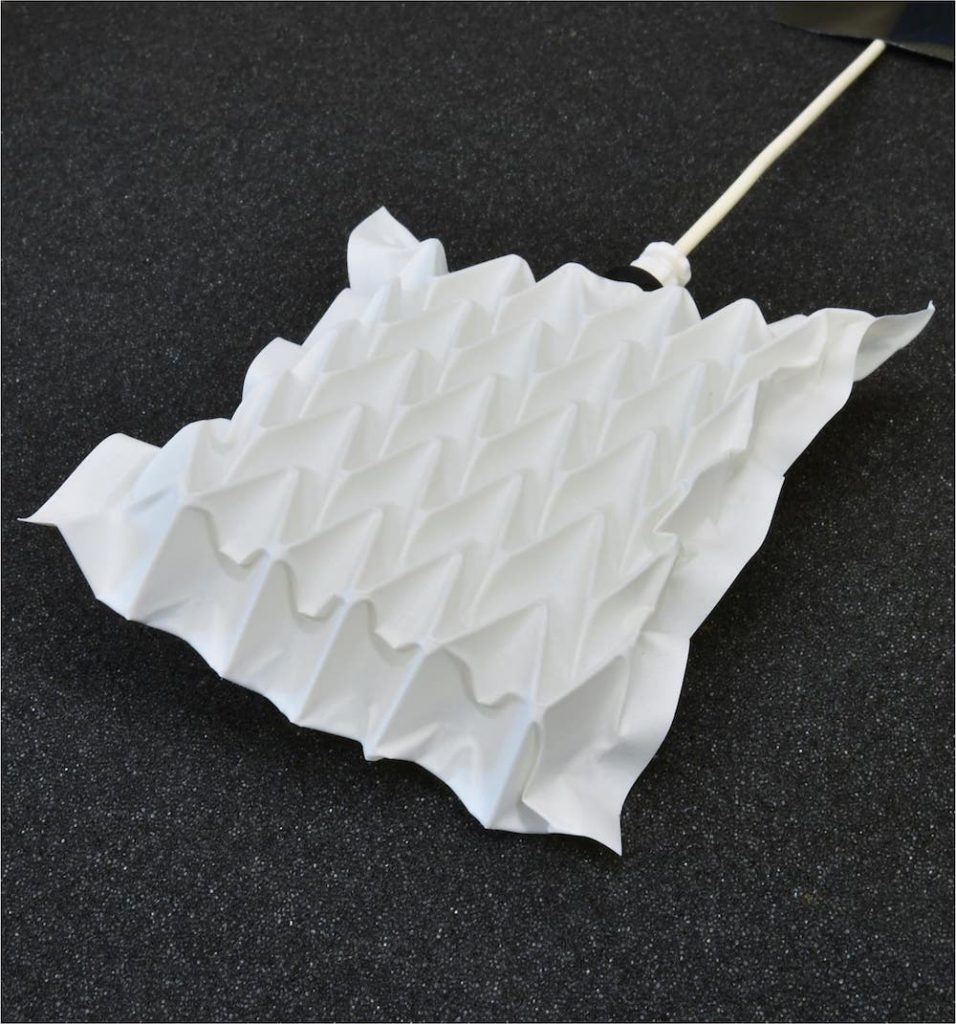
All videos courtesy Proceedings of the National Academy of Sciences. Li et al (2017). Fluid-driven origami-inspired artificial muscles. PNAS

Daniela Rus is the Director of the Computer Science and Artificial Intelligence Lab at the Massachusetts Institute of Technology in Cambridge, Massachusetts.
IRA FLATOW: This is Science Friday. I’m Ira Flatow we’ve all seen construction equipment like backhoes and jackhammers powered by hydraulic pumps and pistons and they do the heavy work. But it turns out that the intricate folds of origami which can transform the plainest piece of paper into a 3-D work of art, origami can also turn a lowly piece of plastic sheeting into an artificial muscle capable of lifting something a thousand times its own weight.
The robotic muscle consists of an origami skeleton. It’s surrounded by a plastic or a fabric skin. And it’s filled with air or water. You change the air or water pressure and the muscle can contract or even clench objects in its grip. Interesting stuff here. To tell us about it is Daniela Rus. She is director of the Computer Science and Artificial Intelligence Lab at MIT in Cambridge. Her work appears in the proceedings of the National Academy of Sciences this week. Welcome to Science Friday.
DANIELA RUS: Thank you so much.
IRA FLATOW: And we have photos and videos of these things in action. They are really something to look at. They are up at our website at sciencefriday.com/origami. You’ve got to see how they move. Tell us, Dr. Rus, you built these muscles with inspiration from origami. Tell us what interests you about origami and as a roboticist.
DANIELA RUS: So those videos are really quite magical. I love looking at them all the time myself. So I am interested in making robots. And robots are made of bodies and of brains that control the bodies. Now for every kind of capability we need in a machine, we need to create a robot that has the body capable to deliver on that capability and the brain capable to control the body.
Now traditionally, robots are made as complex systems. So they consist of many parts that require significant human development effort and expertise to put them together. But in nature, things happen in much more elegant ways. And in particular, folding in nature occurs to create a wide spectrum of complex structures, [INAUDIBLE] functional structures. And this is where origami robots come in. Because inspired by the folding processes in nature, we can invent a new approach to making complex and beautiful machines using the ancient art of origami.
IRA FLATOW: So. you see, you take the origami sort of as the backbone. The paper is the backbone. And you sheath it in some plastic. And I’m looking on our website at one of your origami robots working. And then you suck the air out. And so it curls up, as if it’s a finger in some cases, just simply by the air pressure difference.
DANIELA RUS: Exactly. And what it does can be controlled by the shape of the origami structure we put inside. And so for instance, we can make these machines contract in one dimension like linear muscles. We can achieve two dimensional contraction. We can achieve bending, rotation, twisting. We can achieve a variety of motions just using this very simple principle you described so well, I have to say.
IRA FLATOW: Thank you. Another project I know you’ve worked on is a robotic pill that you can swallow and have it unfold in your stomach. Whoa. Tell us about that.
DANIELA RUS: So we’ve been working with origami in many different applications. And the origami pill came because we were inspired to think about the future of medicine where we might imagine a time when surgeries happened without incisions, without pain, without the risk of infections. And for that kind of vision, we created a robotic pill. So we made the little origami robot that we packaged in an ice pill. You can swallow the ice pill. And when the pill gets into your stomach, the ice melts and the origami robot unfolds.
And now, because the origami robot has a little magnet embedded in it, we can use an external magnetic field to control the location and the movement of this robot. And we can do a lot of interesting things with this technology. For example, we can remove foreign objects that get accidentally swallowed and lodged inside your stomach. And you might ask, who swallows foreign objects.
IRA FLATOW: I’m a parent. I don’t ask that question. I know the answer.
DANIELA RUS: So this robot can actually pull out the button batteries that get lodged in the stomach coating and can puncture holes in the muscle tissue very fast. And with this little antidote origami pill, you can pull that battery out of the stomach coating very fast and very, very smoothly. You can also use these robots to patch wounds inside the body, to deliver medicine, to take tissue samples. So there are many, many different applications we can envision for this type of device.
IRA FLATOW: So in the origami that you’re doing, of course, it is paper folding into different shapes. Bringing this to a little more 21st century idea, would it be possible to 3-D print them instead of fold them around? Or does that ruin it?
DANIELA RUS: Well, actually, you can fabricate the basic structure that is the sheath from which you create origami in many different ways. You can use laser cutters. You can use 3-D printers. You can use paper and scissors. You can use low tech. You can make these robots in a variety of ways. And in fact, they are so easy and inexpensive to create, they have the possibility of becoming pervasive. They have the possibility of becoming very useful tools for education. They could become toys. Or they could become tools for surgeons and in other professions.
IRA FLATOW: Now I understand that you want to take some of these techniques and build an elephant. Am I getting that right?
DANIELA RUS: Yes. So in our paper, we have actually shown how to make one muscle using these techniques. And now we want to compose these muscles to create big, human scale machines that can work side by side with humans in factories or in homes. And we picked the elephant because the elephant is such an interesting creature. So we are actually not going to make a real life sized elephant. We’re going to make a baby elephant that is human sized. But we’re very interested in the trunk of the elephant. We’re very interested in the ability of these soft yet strong muscles to do delicate operations and strong operations at the same time. And if you watch an elephant use its trunk, it’s amazing how that trunk can pick up a peanut. And it can also knock over a competitor.
IRA FLATOW: And so I would imagine, looking at the videos and seeing what materials you’re using to make your construction, it’s probably a lot cheaper to make than something with hydraulics and pistons and things like that.
DANIELA RUS: So we were very surprised to see that such a low cost manufacturing process can lead to actuators, to muscles that have such a wide range of possibilities.
IRA FLATOW: So where would you like to go? What’s your next step here? What’s your–
DANIELA RUS: For this work?
IRA FLATOW: Yes.
DANIELA RUS: Well, with the strong muscles I would really love to make robots that can pack and unpack groceries for me. And maybe move things around and tidy up my space.
IRA FLATOW: Oh, really?
DANIELA RUS: Yeah. In fact, if you think about packing and unpacking groceries, it’s actually very challenging because you have to handle grapes and broccoli at the same time as heavy cartons of milk, for example. And so having the softness of a robot hand, you are able to pick up the broccoli and the grapes, which do not have a regular shape because the softness enables these robot hands to adapt to anything they grasp. On the other hand, having the strength really allows this robot to pick up something heavy like a milk carton.
IRA FLATOW: Wow. I’m looking forward to putting one of these together myself, being the tinkerer that I am. So hurry up and get it ready.
DANIELA RUS: Well, we have recipes.
IRA FLATOW: You have recipes?
DANIELA RUS: We have recipes for making them. We have recipes for making them.
IRA FLATOW: And where would I find those recipes?
DANIELA RUS: Oh, they are published along with our paper.
IRA FLATOW: OK. Well, we have a link up on our web site. And we have some wonderful photos and videos of these things in action. And they’re really cool to look at, at our website it’s sciencefriday.com/origami. Thank you, Dr. Rus for taking time to be with us today.
DANIELA RUS: Thank you so much.
IRA FLATOW: Daniela Rus is director of the Computer Science and Artificial Intelligence Lab at MIT.
Copyright © 2017 Science Friday Initiative. All rights reserved. Science Friday transcripts are produced on a tight deadline by 3Play Media. Fidelity to the original aired/published audio or video file might vary, and text might be updated or amended in the future. For the authoritative record of Science Friday’s programming, please visit the original aired/published recording. For terms of use and more information, visit our policies pages at http://www.sciencefriday.com/about/policies/
Christopher Intagliata was Science Friday’s senior producer. He once served as a prop in an optical illusion and speaks passable Ira Flatowese.